
All you need to get started
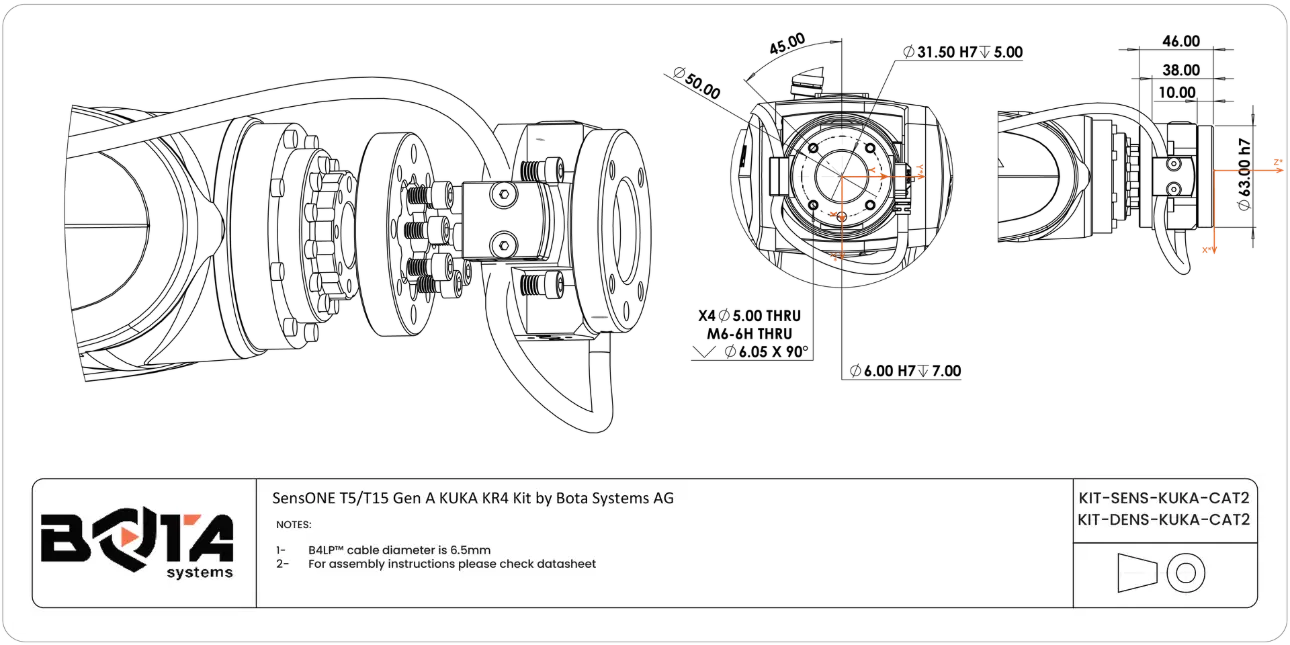
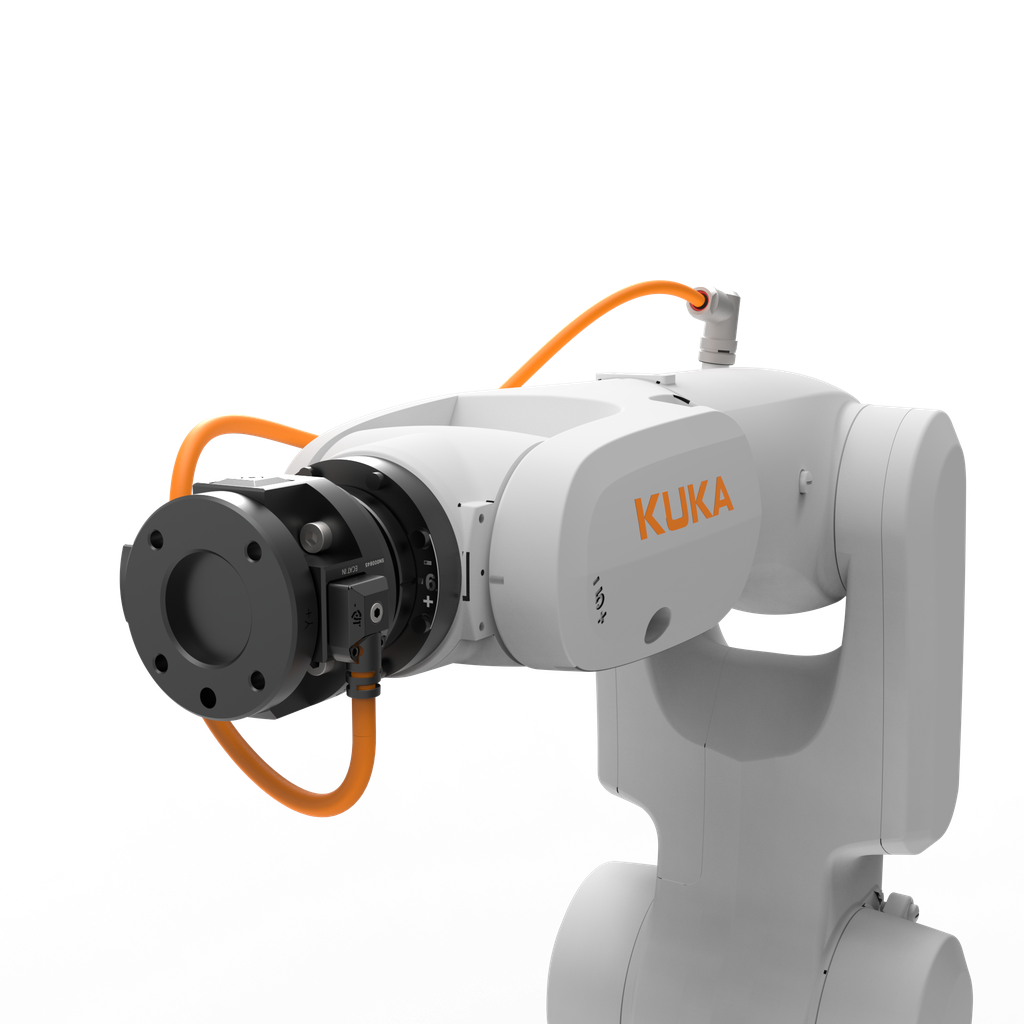
▶ Mechanical adapters, to mount the sensor to the end-effector of the robot
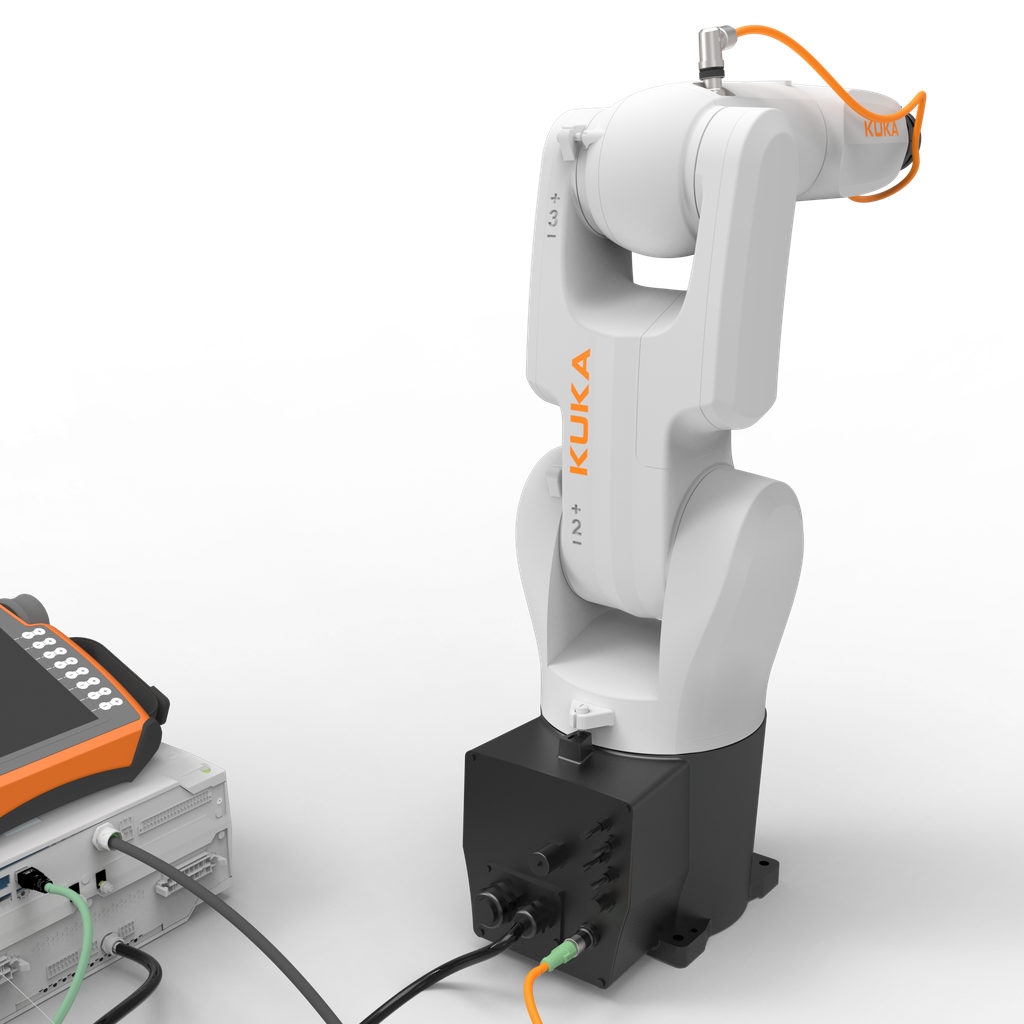
▶ Wiring & cables, to power and connect the sensor to the robot, utilizing the robot's internal wiring with the forearm connection.
▶ Guides & Tutorials, with step by step instruction to integrate to KUKA ecosystem
▶ Two Range Variants, choose between increased range or sensitivity

Performance
▶ 3800Hz sampling rate, leveraging EtherCAT communications
▶ Low drift, stability over time in all 6-axes with our patented design
▶ Low latency, with native protocol implementation ensuring up to 1 sample latency

Water & Dust resistant
▶ Up to 1m, submersible for 30 mins
▶ waterjets, protection from from every angle
▶ Fine dust, protection

Supports
KUKA.ForceTorqueControl 5.0
▶ Execution of motions in accordance with the measured forces
▶ Detection of, and reaction to, specific load conditions and associated events
▶ Distortion-free positioning (motion up against a stop)
▶ Maintenance of process forces irrespective of the position and tolerances of the component
▶ Maintenance of complex process force characteristics during machining
▶ Compensation for component tolerances by programming active compliance of the robot
▶ Sensitive collision monitoring
▶ Monitoring of the sensor load limits
▶ Programmable tolerances for defined force and torque setpoints
▶ Monitored control response to the programmed force setpoints
▶ Time-controlled maintenance of the force setpoint
▶ Path limitation of the force-controlled motion