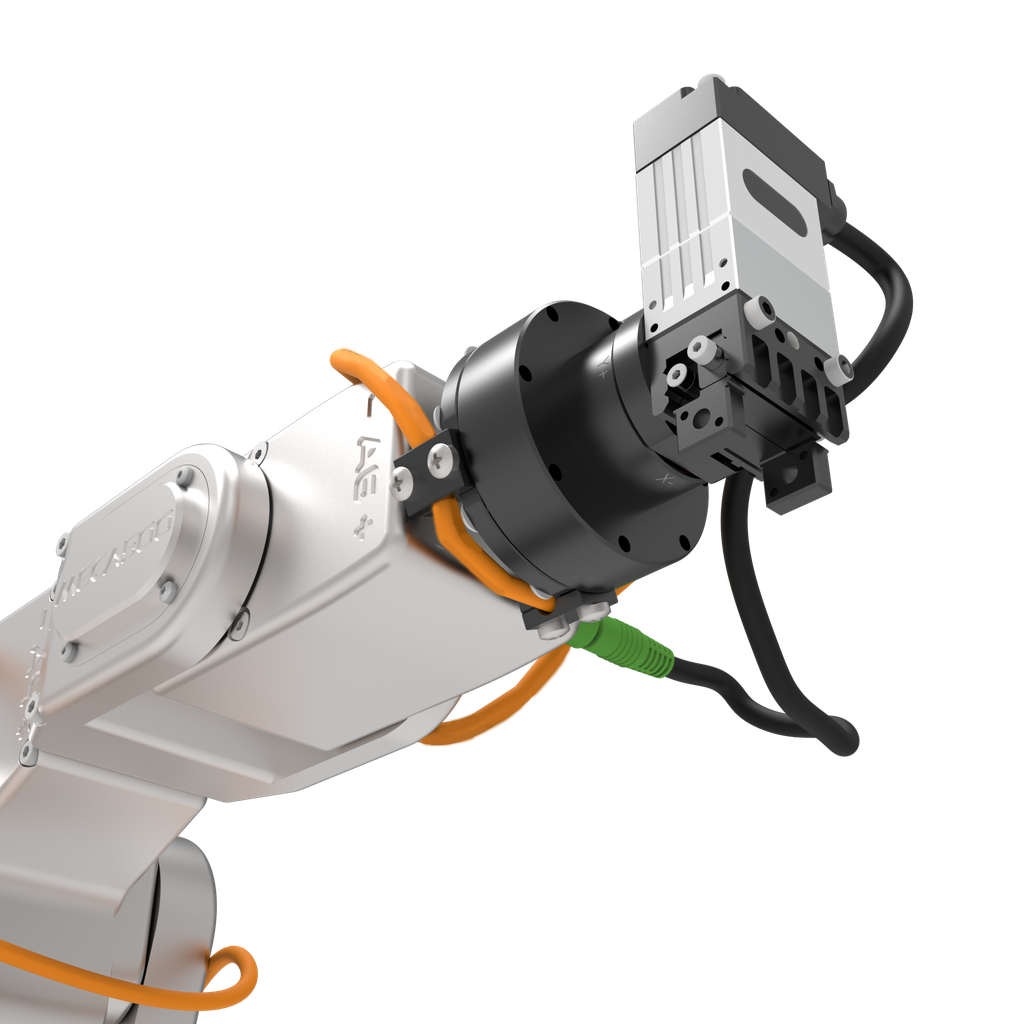
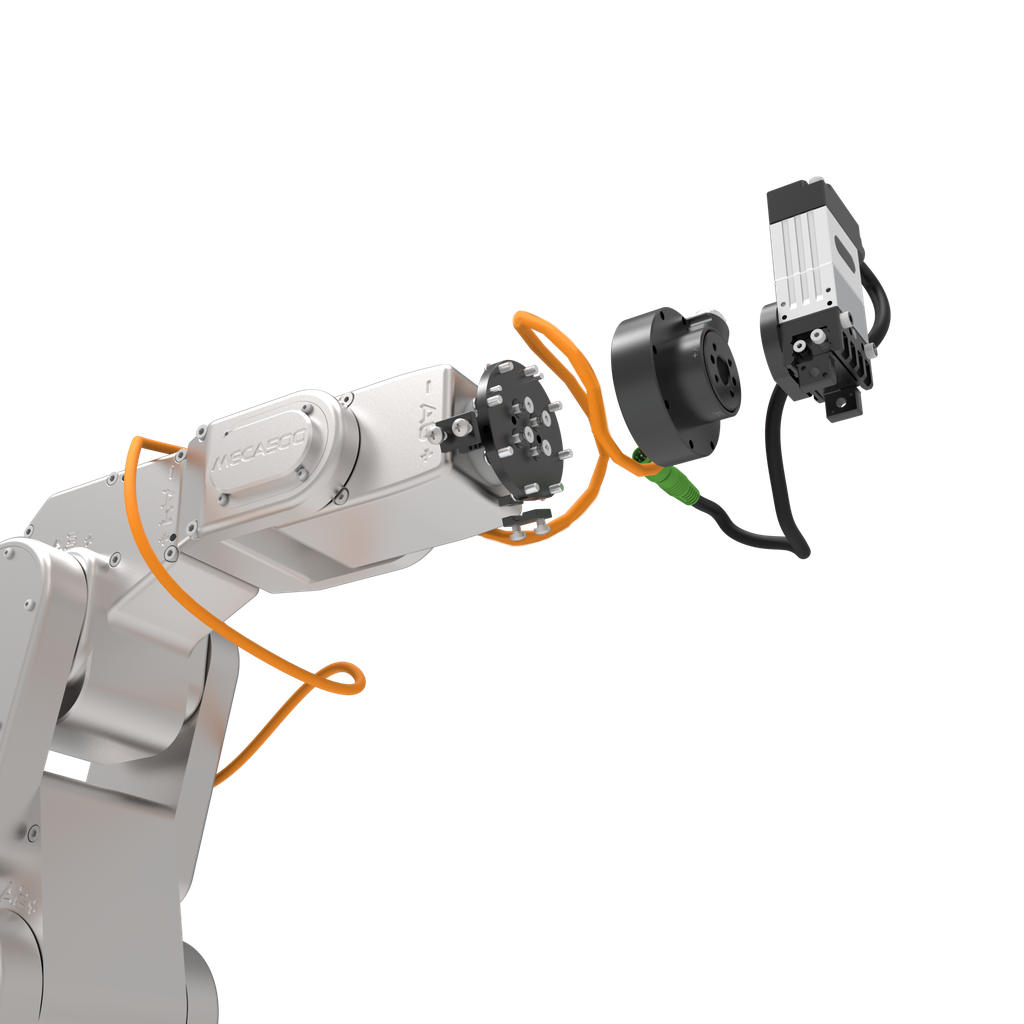
All you need to get started
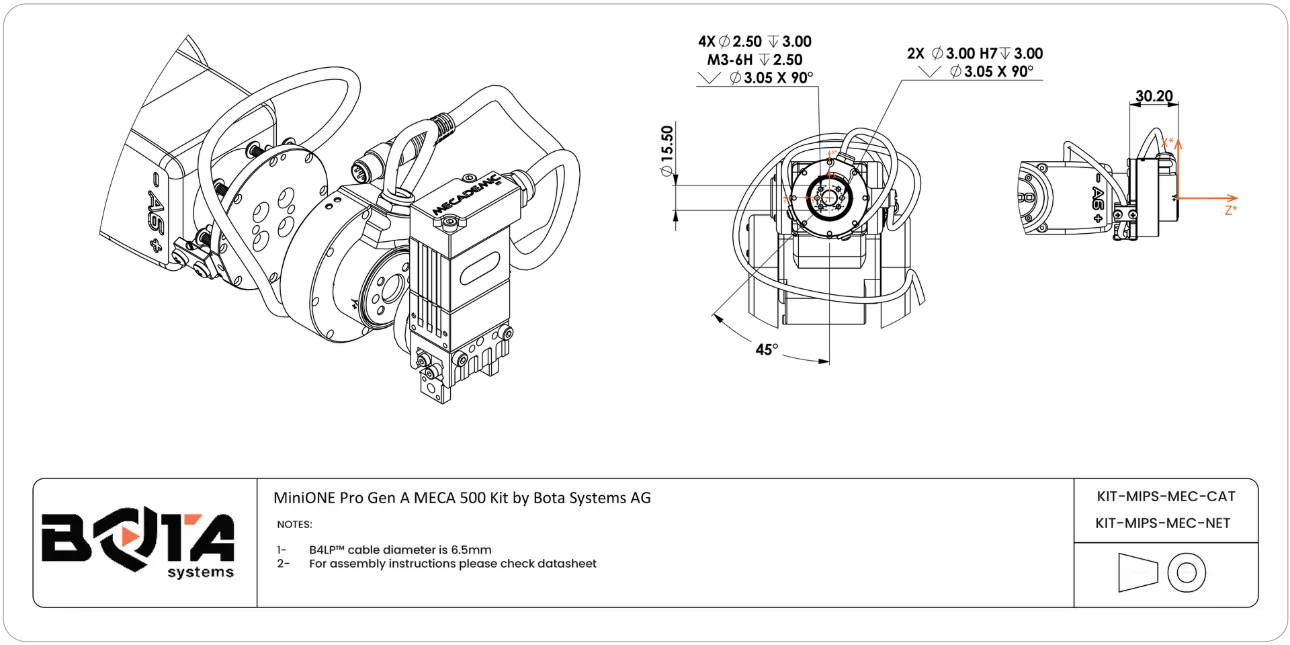
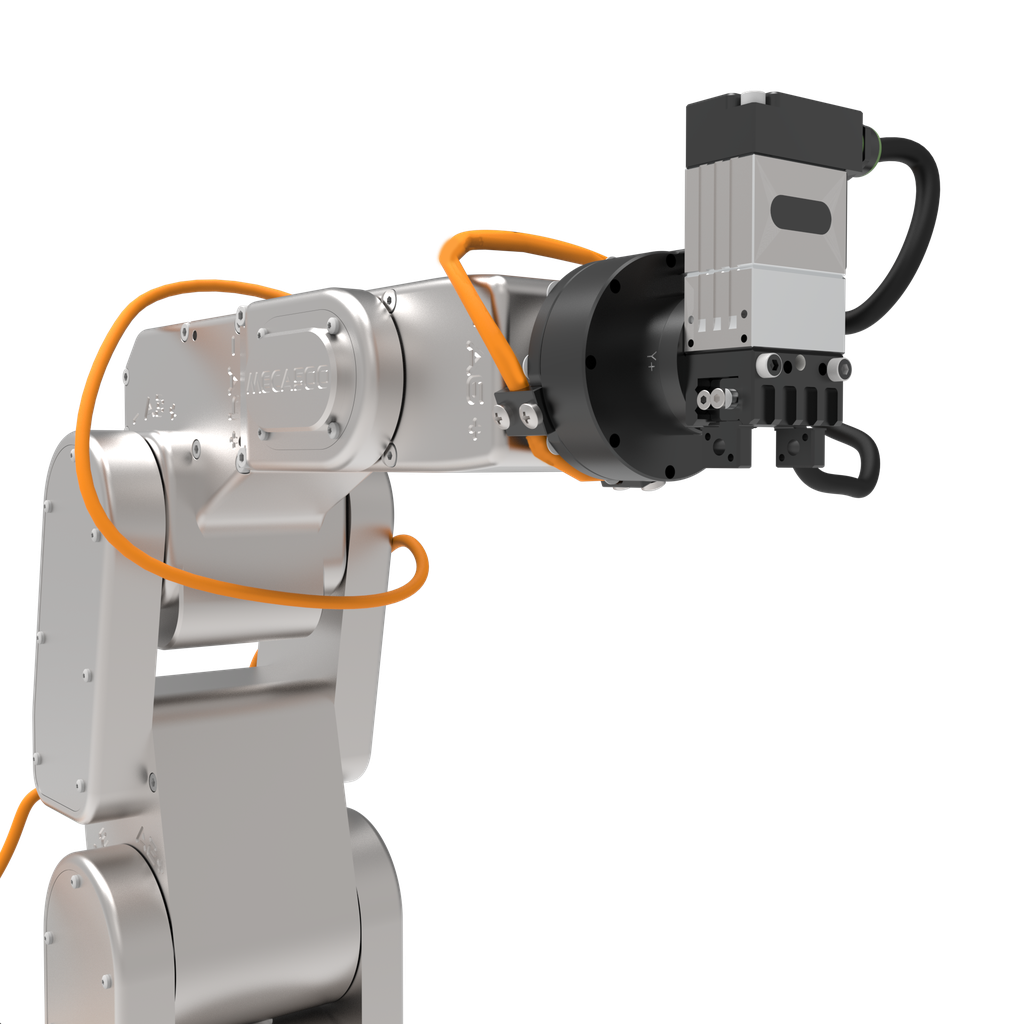
▶ Mechanical adapters, to mount the sensor to the end-effector and the gripper to the sensor
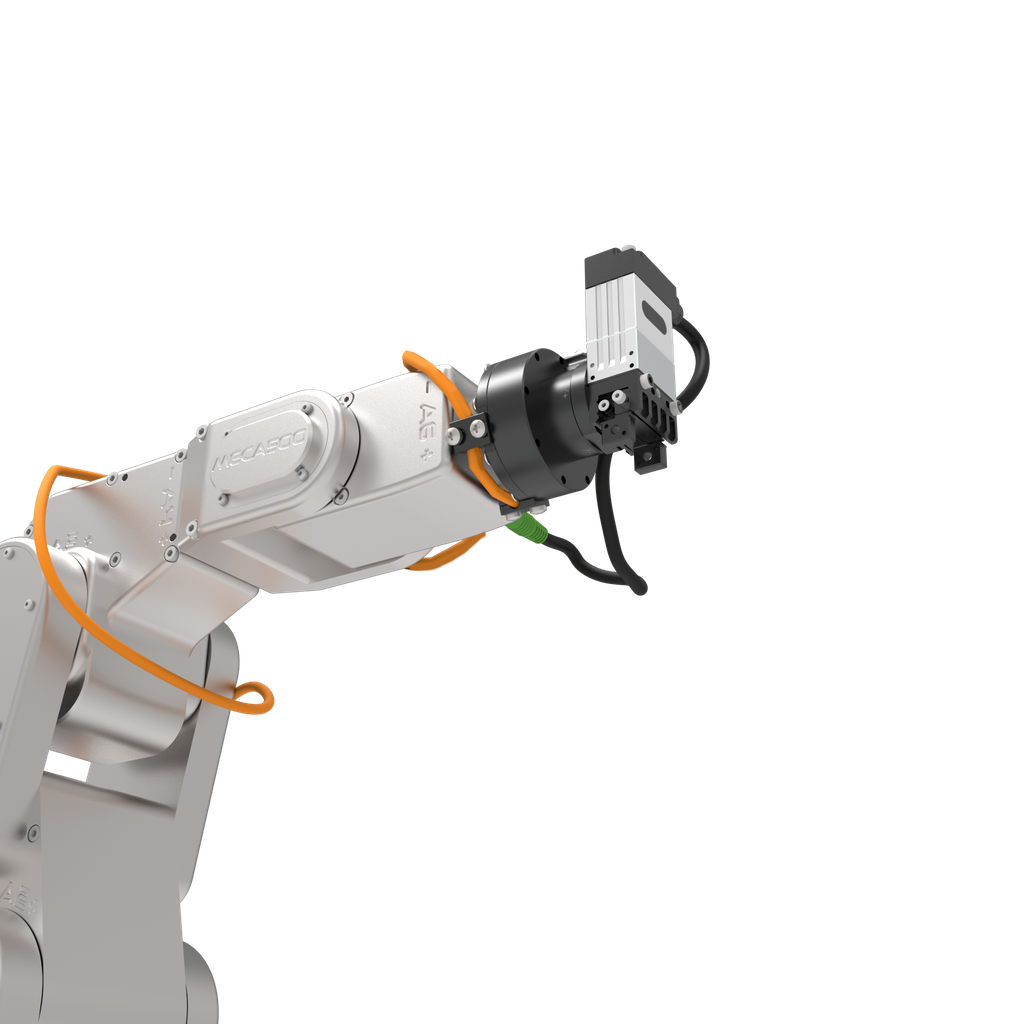
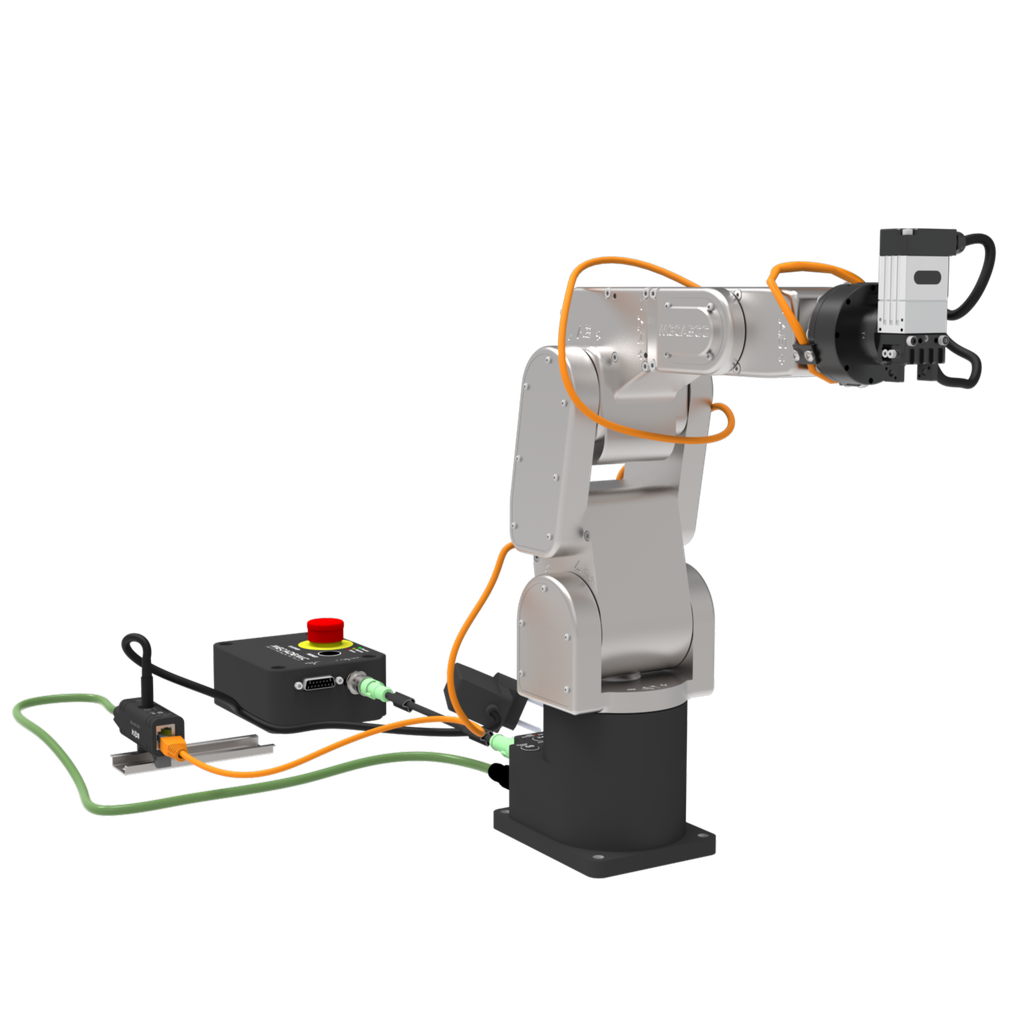
▶ Wiring & cables, to connect and power the sensor to the robot.
▶ Software, with example applications and integration to the robot
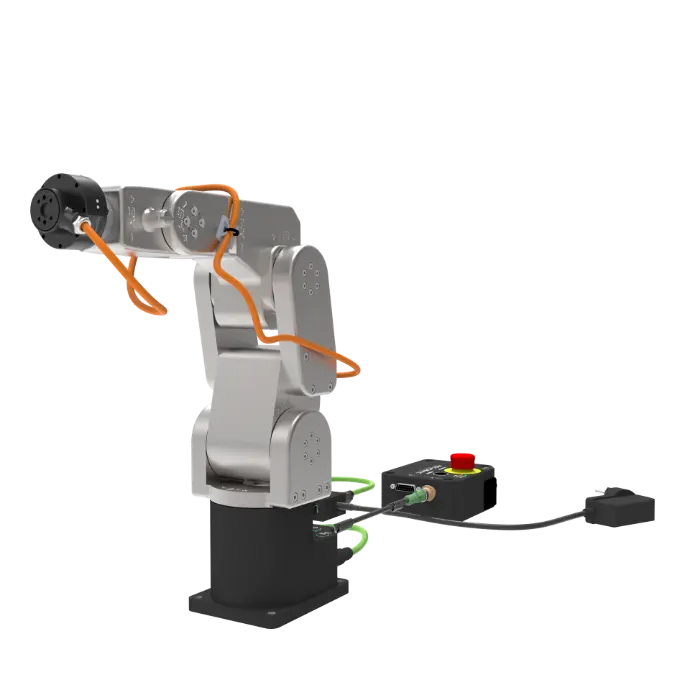
A variety of connection options
▶ PoE Ethernet connect the sensor to your existing Ethernet infrastructure, power the sensor through PoE and configure it from the browser.
▶ EtherCAT, connect the sensor to the robot's EtherCAT chain and control everything from a single EtherCAT master
Performance
▶ Increase your robot's accuracy, with our contact detection algorithms to 1 micro meter
▶ Detect ultra low forces, up to 1 gram or 0.035 ounces
▶ Low latency, react instantly to contact to protect sensitive and fragile equipment

A new era of applications
▶ Hand Guidance for easy teaching of positions
▶ Force tracking, for contour following, deflashing, polishing.
▶ Contact Detection, for part alignment, Pick and weight, Button testing, face matching.
FT Stack SDK
▶ Python based architecture.
▶ Intuitive, graphical use interface.
▶ Support, our team is one call away to help with your issue.
▶ Examples, controllers and programs for a variety of applications