A variety of protocols with
low-latency
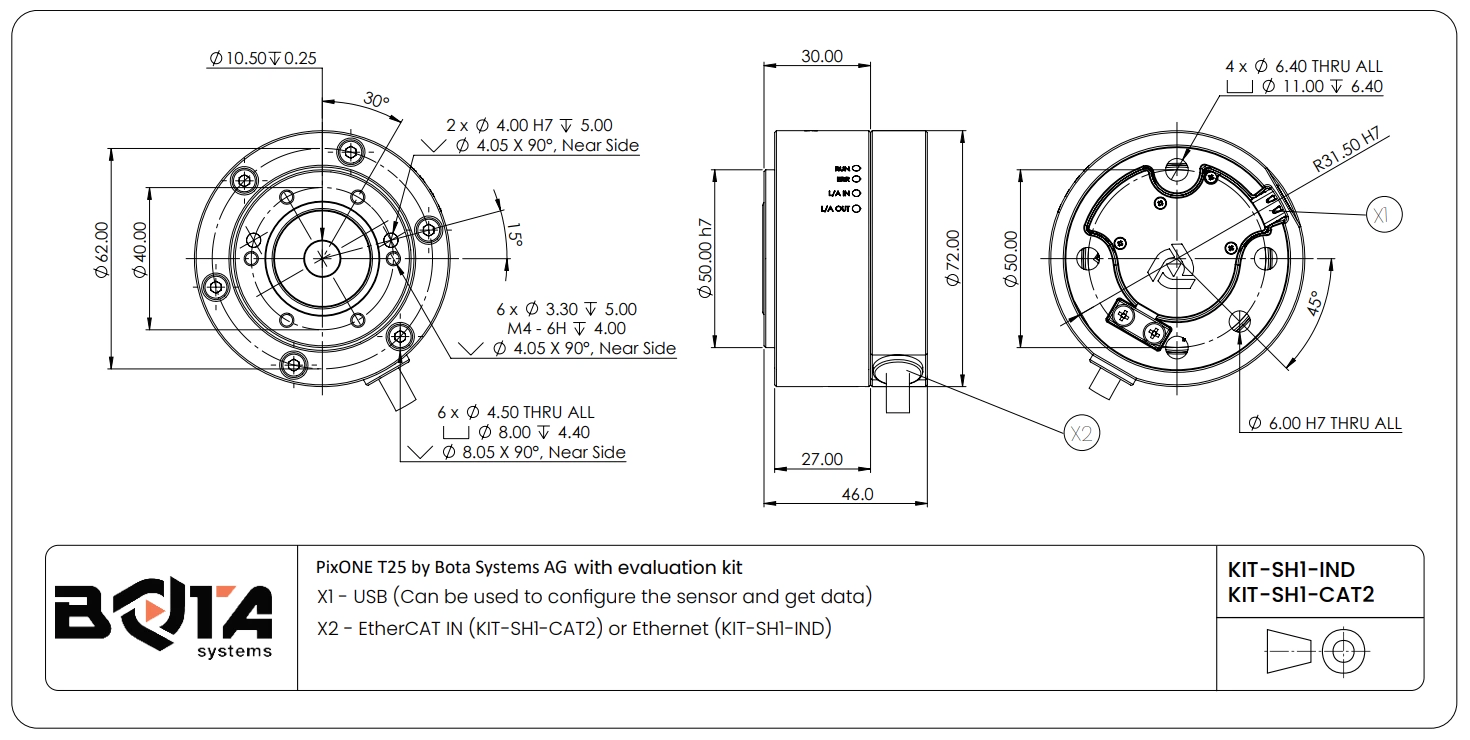
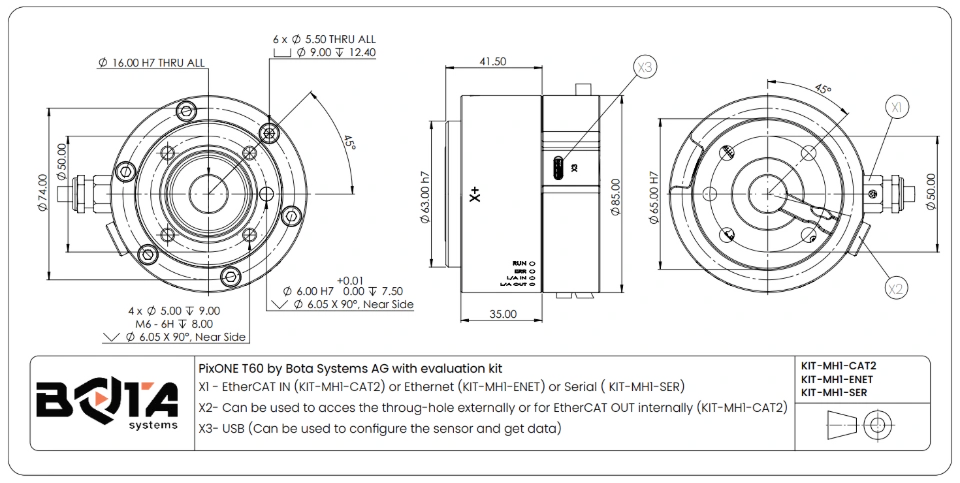
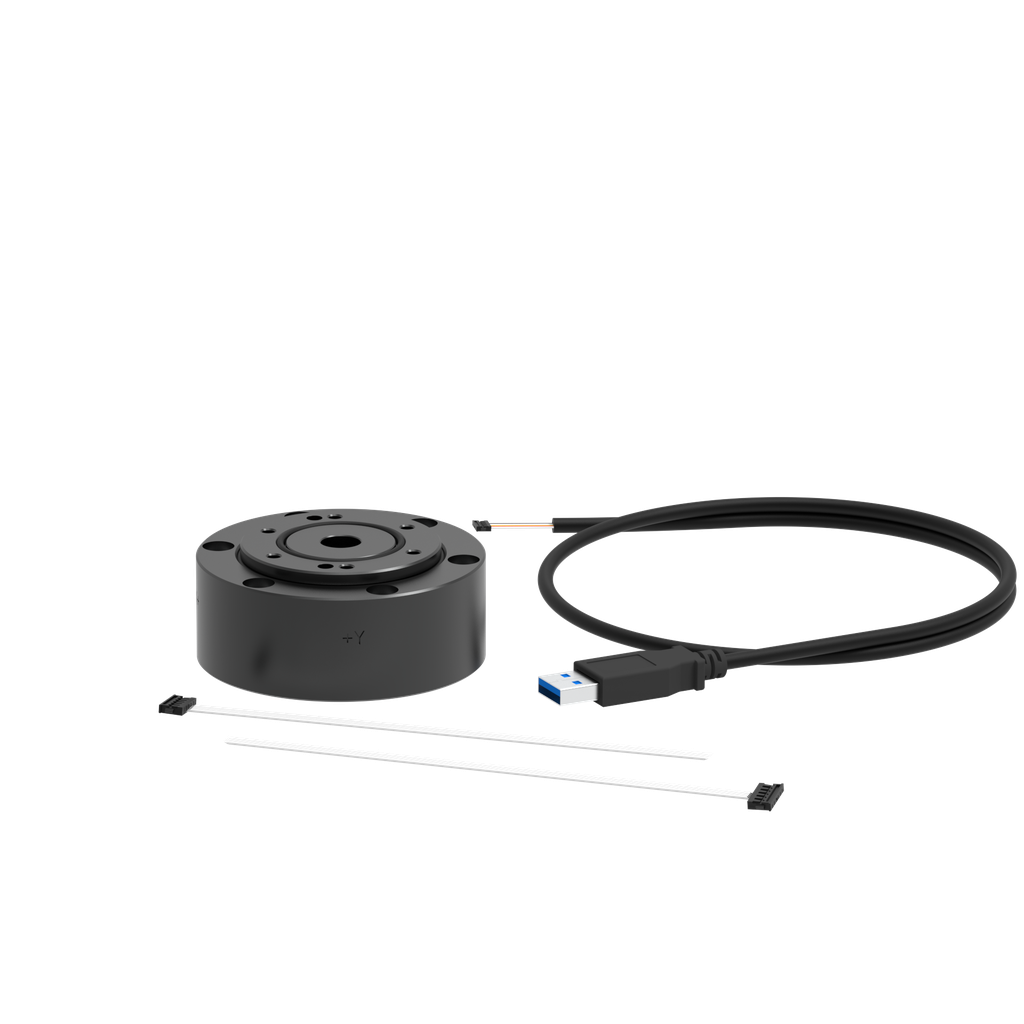
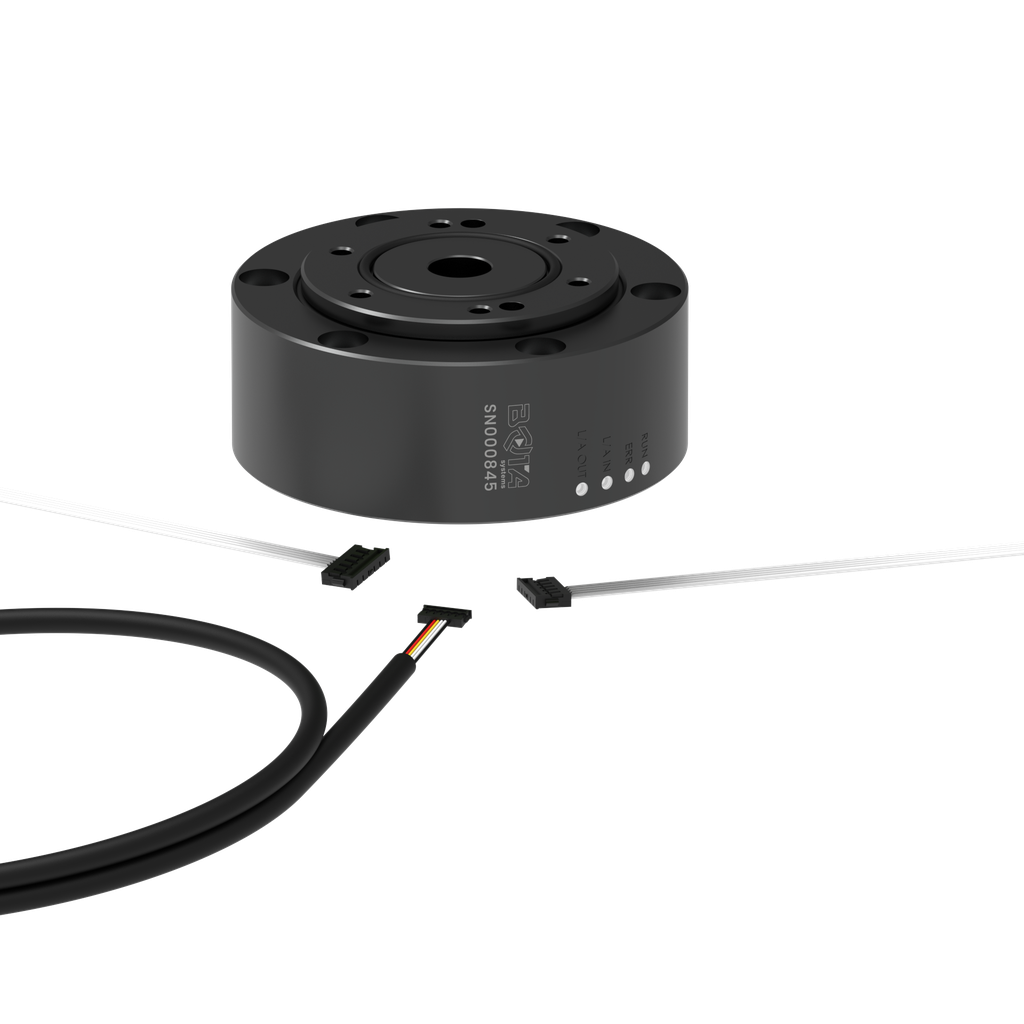
▶ PoE Ethernet, RS422/485/232, Modbus and USB for instant integration and configuration using our online config tool.
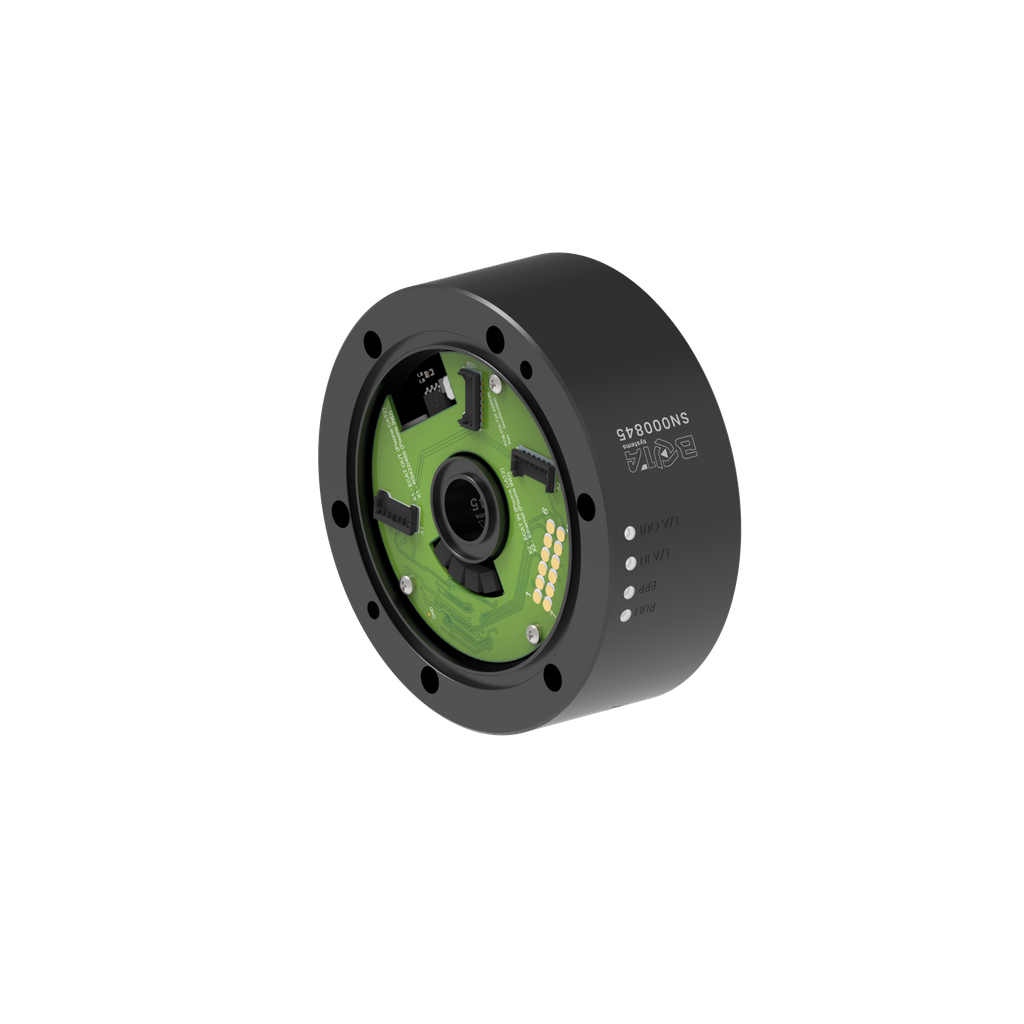
▶ EtherCAT IN and OUT, with USB for commissioning using our online config tool.
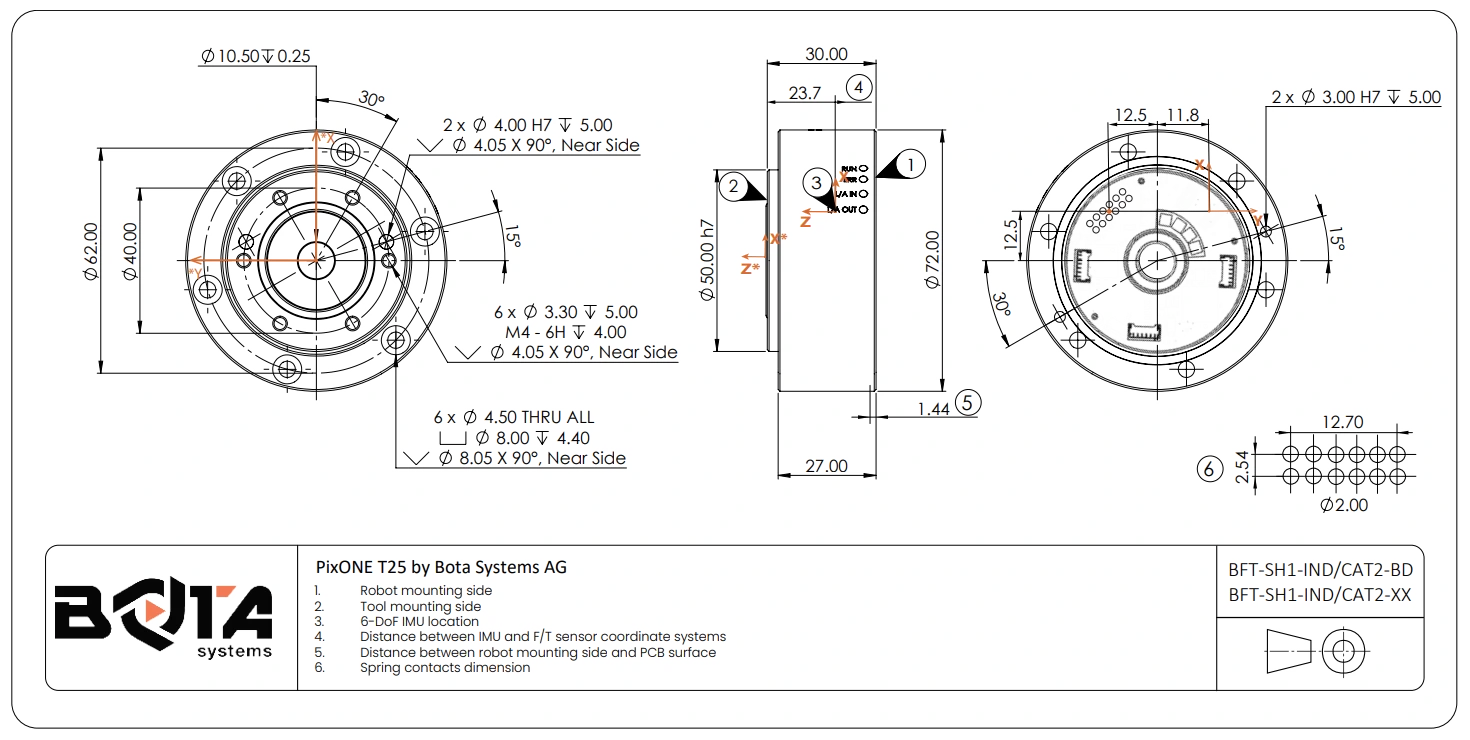
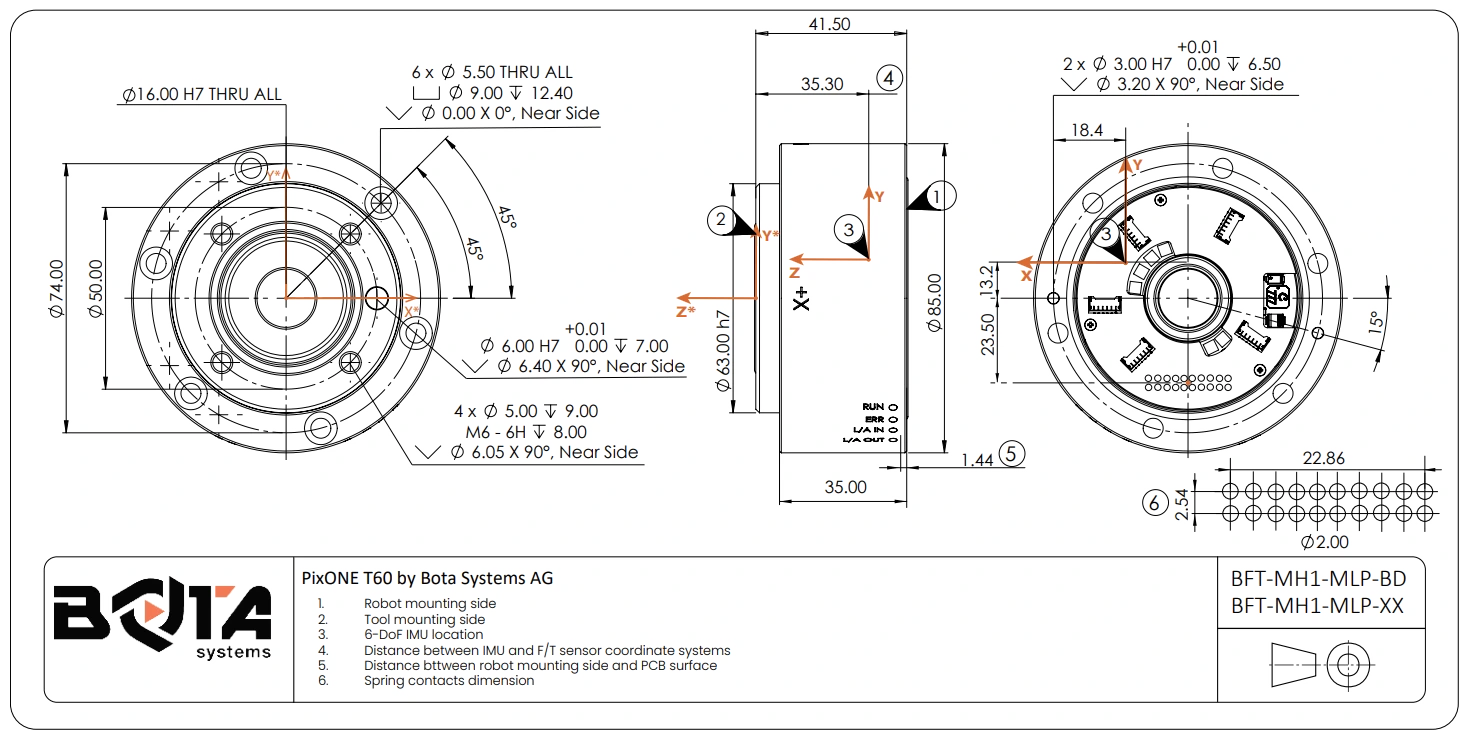
▶ Spring-loaded Contacts, for minimizing assembly cost.
Performance
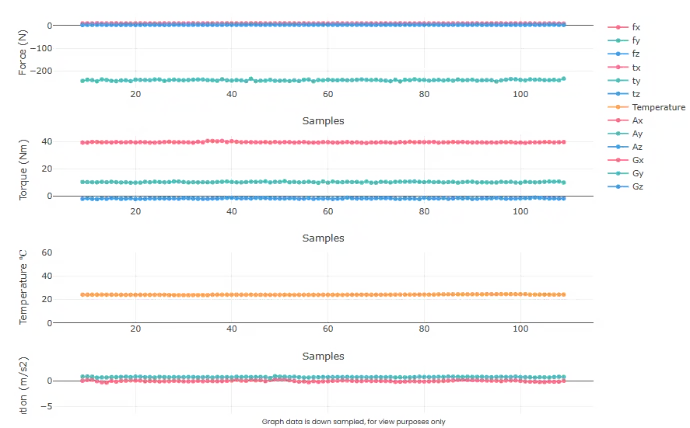
▶ 3800Hz sampling rate, supported in all protocols
▶ Low drift, stability over time in all 6-axes with our patented design
▶ Low latency, with native protocol implementation ensuring up to 1 sample latency
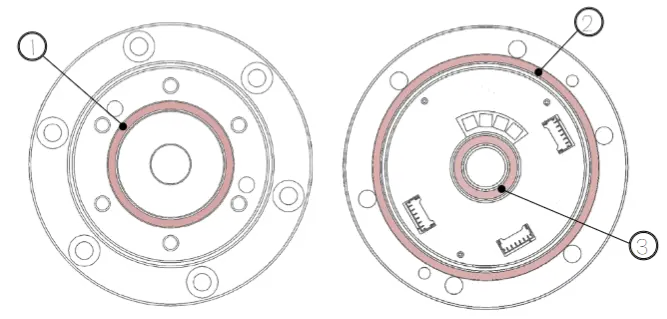
O-Ring level Protection
▶ Up to 1m, submersible for 30 mins
▶ waterjets, protection from from every angle
▶ Fine dust, protection
▶ Through-hole, protection
FT Stack SDK
▶ C++, Python, ROS Drivers, optimized and ready to use.
▶ Windows, Linux and embedded architectures support.
▶ Taring, gravity compensation and more functions available.
▶ Sensor configuration, by the drivers.

Initial setup in no time
▶ Evaluation kits, for fast evaluation and software integration directly mount on ISO 50 Flange
▶ Online config for easy commissioning.
▶ Guides & Tutorials to guide you through the integration
▶ Example designs to ease the design of the system.