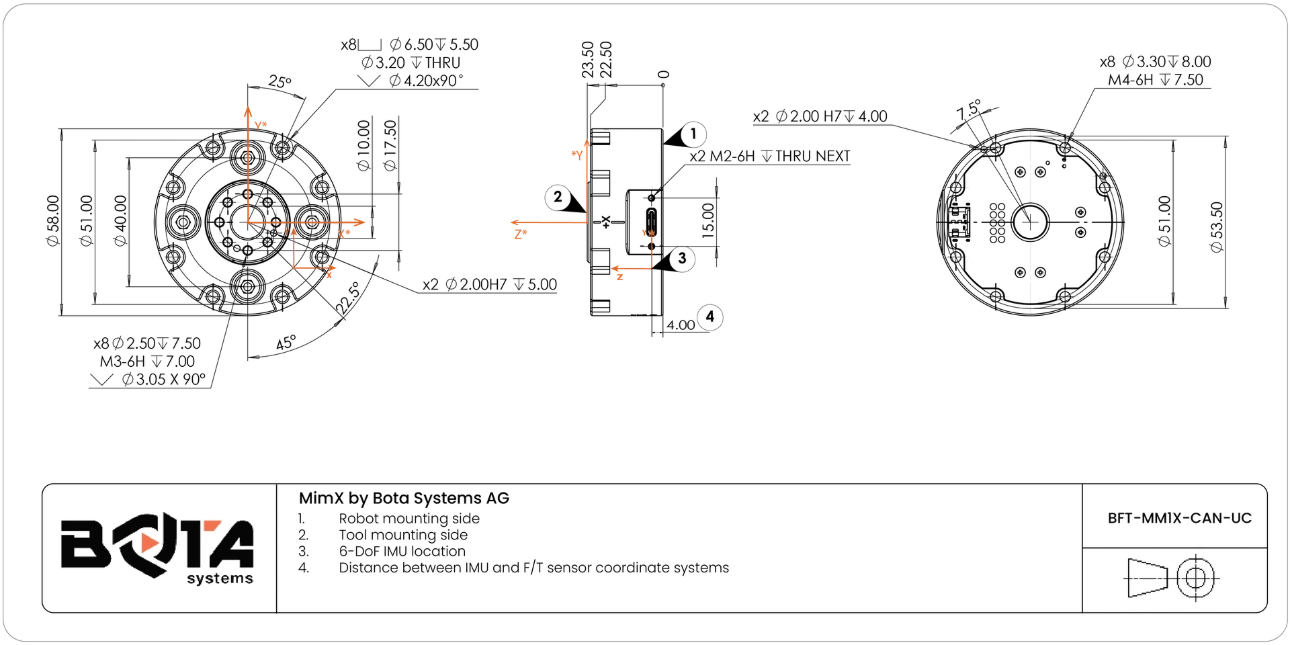

Connections
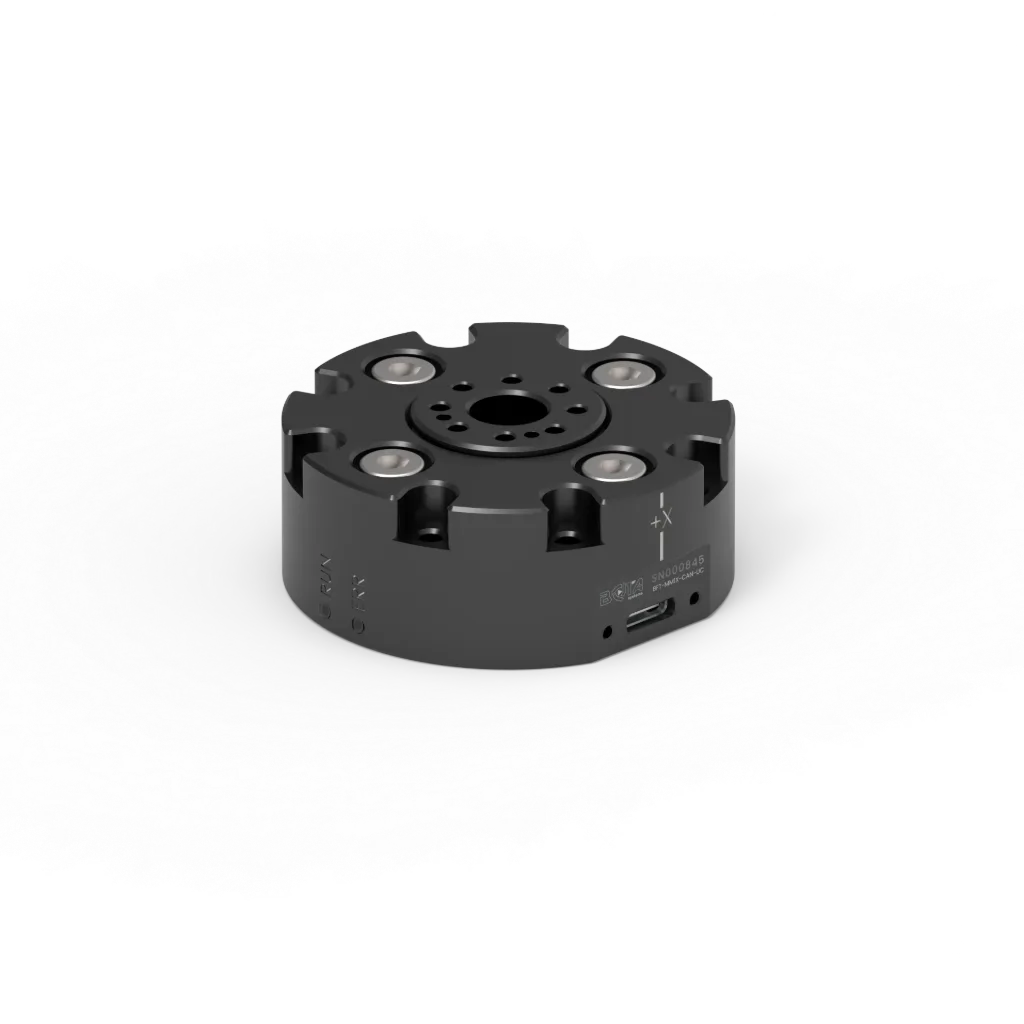
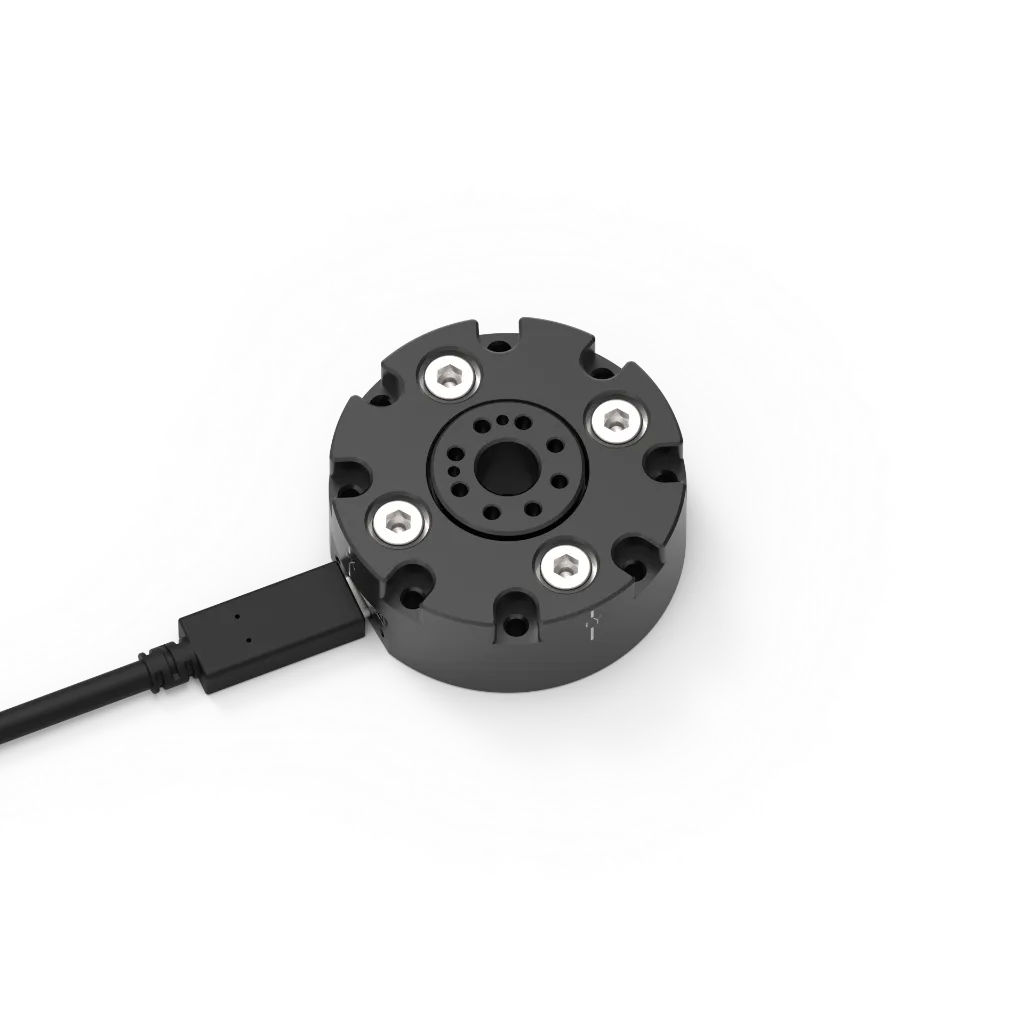
▶ USB C cable, easy & fast setup for instant measurements
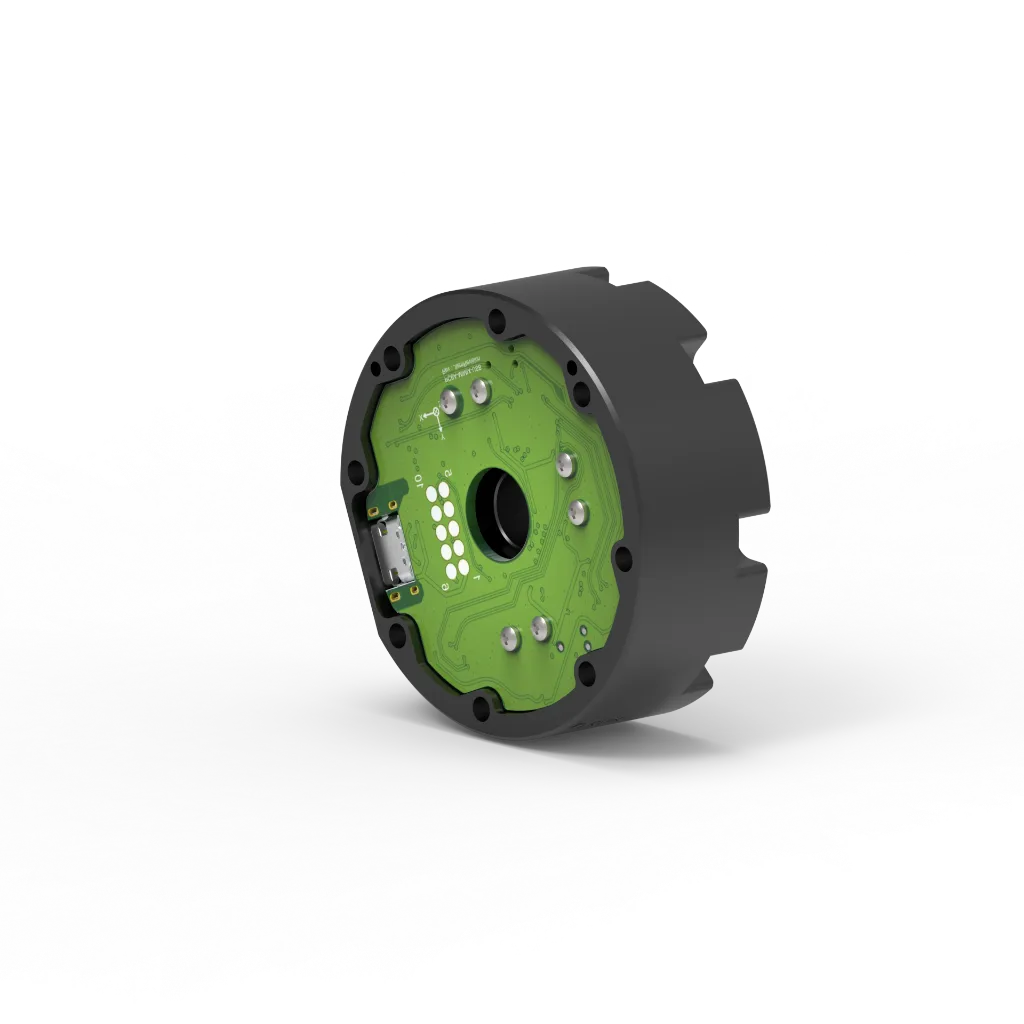
▶ Spring contacts, the sensor features contacts pads for spring contacts allowing the user to use additionally the following communication protocols: USB, UART, RS485, CAN, CAN FD and power the sensor with a 4-36V input range
▶ Kits for Agile X robots. With the MimX Gen A Piper Kit the sensor can directly mount on the robot and connect to the XT30 2+2 connector of the robot, using the internal wiring
Performance
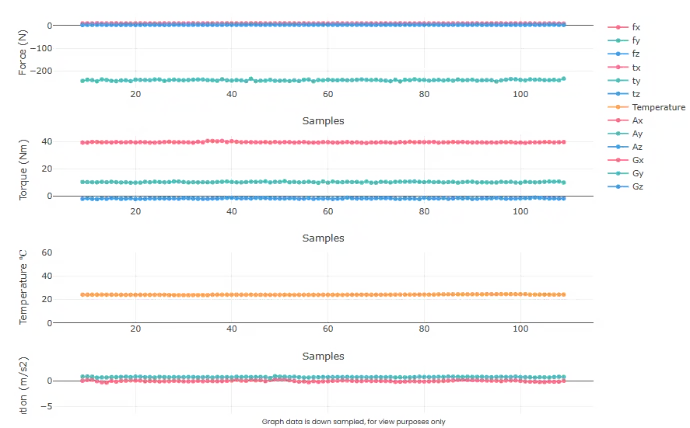
▶ 8000Hz sampling rate, supported in all protocols
▶ Low drift, stability over time in all 6-axes with our patented design
▶ Low latency, with native protocol implementation ensuring up to 1 sample latency
FT Stack SDK
▶ C++, Python, ROS Drivers, optimized and ready to use.
▶ Windows, Linux and embedded architectures support.
▶ Taring, gravity compensation and more functions available.
▶ Sensor configuration, by the drivers.

Initial setup in no time
▶ Robot Integration kits, offering mechanical adapters, cabling and software for the robot controller
▶ Online config for easy and intuitive setup. Skip reading the user manual
▶ Guides & Tutorials to guide you through the integration
▶ USB connection for configuration and measurements with our online config tool.